Kinematics - In this unit, we covered topics related to motion of an object, like position, velocity, acceleration, and projectile motion. We particularly focused on graphing this motion, and learning how these graphs and models correlated with each other and represent how an object moves.
Position, Distance, and Displacement - Position is where an object is at a certain point of time. Distance is the total amount the object travels in a certain increment of time, while displacement is only the "net" amount of units traveled from the initial point to the ending point. For example, if an object's position is 2 meters and it moves 4 meters to 6, but then moves 1 meter back, the distance and displacement are 5 and 3 meters respectively.
Interpreting Position-Time Graphs: A position-graph plots the position of an object (vertical axis) as it changes due to time (horizontal axis). Our buggy lab depicted a position-time graph and its characteristics of having a y-intercept, which shows the position at zero seconds, and a slope. A p-t graph's slope shows direction and magnitude, like a vector. Its direction is shown by its sign (positive or negative), while its magnitude is essentially steepness and depicts the speed of an object. This makes sense as a p-t graph inherently plots motion over time, which is why the magnitude/steepness of a p-t graph is speed. Since the slope represents direction and speed, the slope of a p-t graph shows us the velocity of the object. Velocity as our slope makes sense, as velocity is defined as the change in position over change in time, which is precisely what the slope of a p-t graph tells us.
Determining Velocity and Speed from a Position-Time Graph: We can determine the velocity from a position-time graph by looking at its slope, which shows the velocity of an object. The steepness of this slope represents speed, so, if a graph increases quickly, then the graph's speed is increasing as time increases.
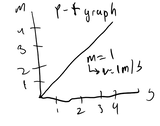
Example - For the below p-t graph, since the slope is 1 meter per second, the velocity is also 1 m/s. We also know the speed increases as at a constant rate since the steepness of the graph stays the same.
Interpreting Velocity-Time Graphs: Velocity-Time graphs depict the change in velocity (vertical axis) as time passes (horizontal axis). This, by definition, is acceleration, meaning the slope of a v-t graph is acceleration. Acceleration is defined as the how fast the speed changes. This means that, for example, a velocity time graph with a constant velocity has an acceleration of zero. In our cart on ramp lab, we depicted how the ramp affected acceleration and, thus, changed our velocity-time graph. The y-intercept of a velocity time graph represents velocity initial or when the velocity when the object moves zero seconds.
Determining Acceleration and Starting Velocity from a Position Time Graph: Since velocity is the slope of a p-t graph and acceleration is the slope of a velocity-time graph, then that means acceleration is the slope of the slope of a position-time graph. This means, for example, if a position-time graph represents a linear line, then the acceleration is zero. In this case, the velocity is constant (with the p-t graph) being a linear line, which means the acceleration is zero. You can calculate the velocity of any point/line on the position-time graph by finding the slope of that line using its minimum and maximum points. For finding the starting velocity, you can simply look at a p-t graph's initial point and use its x-coordinate as the starting velocity.
Determining Acceleration and Starting Velocity from a Position Time Graph: Since velocity is the slope of a p-t graph and acceleration is the slope of a velocity-time graph, then that means acceleration is the slope of the slope of a position-time graph. This means, for example, if a position-time graph represents a linear line, then the acceleration is zero. In this case, the velocity is constant (with the p-t graph) being a linear line, which means the acceleration is zero. You can calculate the velocity of any point/line on the position-time graph by finding the slope of that line using its minimum and maximum points. For finding the starting velocity, you can simply look at a p-t graph's initial point and use its x-coordinate as the starting velocity.
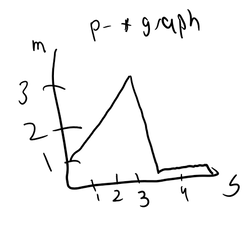
Example: You can find the starting velocity from this by looking at the starting point and seeing that, on the p-t graph) the initial point t is (0,1). This means that the initial velocity at this point (on a v-t) is 0.
Determining Position, Distance and Displacement from a Velocity Time Graph - You can find the position, distance and displacement by using the velocity equation (v = change in position/change in time). In order to find equation, you must solve for position = velocity * time by plugging in the given values from the velocity-time graph. To find distance, you calculate the area underneath a velocity-time graph by creating smaller shapes from the area, and finding the areas of the smaller shapes and them together. For displacement, the process is similar to distance, but, if there's a section/shape under the graph that's negative, then it's subtracted from the rest of the area since displacement is the "net" change in position and takes the sign (positive or negative) into account. If the graph was only positive, then the displacement and distance would be the same.
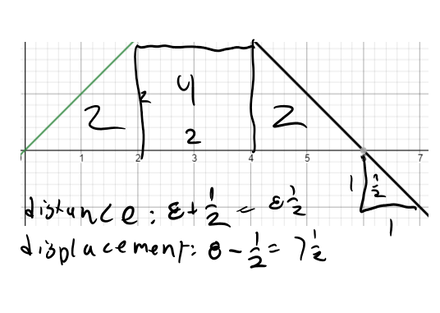
Example - I calculated the area of everything that exists under the velocity-time graph, multiplying time by velocity. This means the area is in terms of change of position, which is important to finding distance and displacement. Since part of the velocity graph is negative, we must subtract 1/2 (the area of the triangle under the x-axis) from 8 to find the displacement, but add it to find the distance.
Connecting Representations of Motion: We already covered how position, velocity, and acceleration graphs all relate; the velocity is the slope of a p-t graph and the acceleration is the slope of a v-t graph. An example showing this correlation and how the graphs relate is depicted below. There are also other models, including strobe diagrams and motion maps that depict an object's movement and the rate at which it increases.
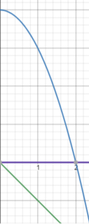
The position-time graph here is quadratic and decreases as it approaches 2 seconds. Since the graph is quadratic, the velocity-time graph is linear and the velocity decreases at about 1 m/s as it approaches 2 seconds. The linear line also starts at (0,0) since the vertex position-time graph is at t = 0, meaning a horizontal zero has to exist for the velocity-time graph. Because the v-t graph is linear, the acceleration is constant at 0, and does not affect the velocity.
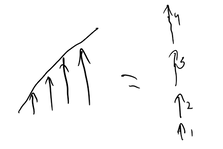
This strobe diagram and the arrows increasing in size depicts how the object's position is increasing as time increases.

This motion map represents how the object is moving forward and getting faster.
Solving Problems Using Constant Velocity and Uniform Accelerated Models:
x = Xi + Vi * t
Xf = Xi + Vt + 1/2 * a * t ^2 ; change in x = vt + 1/2at^2
When solving for problems using these equations, you have to figure out at least three variables (given directly or indirectly).
Example 1: A bus leaving an intersection accelerates at 2 m/s^2. Where is the bus after 4.4 seconds? (From Mastering Physics 1.2 Number 4)
Initial Velocity = 0 m/s
a = 2 m/s^2
t = 4.4 seconds
Use UAM -> 0 * 4.4 seconds + 1/2 * 2 sec * (4.4 m/s^2)^2 = 19.36 m
Example 2: You throw a tennis ball straight upward. The initial speed is 12 m/s. How long will it take for the ball to reach it maximum height? (From Mastering Physics 1.2 Number 9)
Vi = 12 m/s
Vf = 0 m/s
a = -9.81 m/s^2
Use constant velocity -> 0 = 12 - 9.81t -> -12 = -9.81t = t = 1.22 seconds
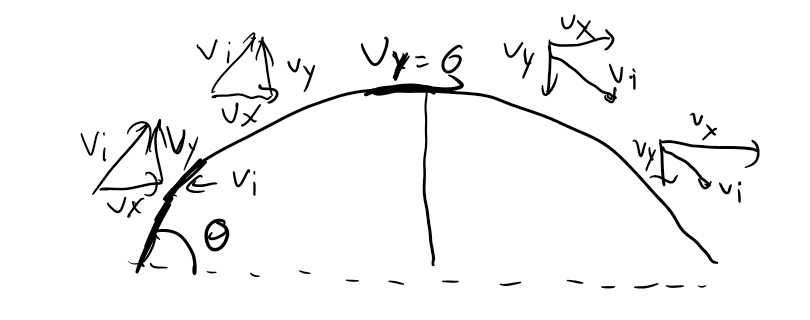
Projectile Motion - A projectile, an object in motion, experiences projectile motion when it moves in a curved path that is only affected by gravity. The x-motion/velocity determines how far the object moves, while the y-motion/velocity determines how long the object is in the air for. This is represented by the penny activity we did in class, as, even though the pennies were dropped in different spots on the counter, they landed at the same time since they were at the same height in the air. The horizontal motion is show by Vx * t and the vertical motion is show by 1/2at^2 + vi * t. The maximum height is when Vy (the y-motion) is equal to zero, so you can solve for it by using the equation for vertical motion, trigonometry, and plugging in zero and 9.8 m/s^2 (gravity) for a. You use the horizontal motion equation to find the range since range is the displacement in the horizontal direction. It's important to note how both components, horizontal and vertical, are important for projectile motion.
x = Xi + Vi * t
Xf = Xi + Vt + 1/2 * a * t ^2 ; change in x = vt + 1/2at^2
When solving for problems using these equations, you have to figure out at least three variables (given directly or indirectly).
Example 1: A bus leaving an intersection accelerates at 2 m/s^2. Where is the bus after 4.4 seconds? (From Mastering Physics 1.2 Number 4)
Initial Velocity = 0 m/s
a = 2 m/s^2
t = 4.4 seconds
Use UAM -> 0 * 4.4 seconds + 1/2 * 2 sec * (4.4 m/s^2)^2 = 19.36 m
Example 2: You throw a tennis ball straight upward. The initial speed is 12 m/s. How long will it take for the ball to reach it maximum height? (From Mastering Physics 1.2 Number 9)
Vi = 12 m/s
Vf = 0 m/s
a = -9.81 m/s^2
Use constant velocity -> 0 = 12 - 9.81t -> -12 = -9.81t = t = 1.22 seconds
Projectile Motion - A projectile, an object in motion, experiences projectile motion when it moves in a curved path that is only affected by gravity. The x-motion/velocity determines how far the object moves, while the y-motion/velocity determines how long the object is in the air for. This is represented by the penny activity we did in class, as, even though the pennies were dropped in different spots on the counter, they landed at the same time since they were at the same height in the air. The horizontal motion is show by Vx * t and the vertical motion is show by 1/2at^2 + vi * t. The maximum height is when Vy (the y-motion) is equal to zero, so you can solve for it by using the equation for vertical motion, trigonometry, and plugging in zero and 9.8 m/s^2 (gravity) for a. You use the horizontal motion equation to find the range since range is the displacement in the horizontal direction. It's important to note how both components, horizontal and vertical, are important for projectile motion.
Dynamics - For this unit, we covered topics related to force. Specifically, we focused on the laws of how forces interact on an object together, learning how to use models and diagrams to represent different types of scenarios of forces interacting on an object. We also dedicated significant time to learning how to use our understanding of forces and kinematic equations to problem solve and find solutions to application questions.
Newton's First Law:
Newton's First Law of inertia tells us that an object in motion will have a constant velocity and direction unless acted on by an unbalanced force. So, for example, a soccer ball will have a constantly velocity after it is kicked, but, if another player stops it, then the velocity and direction changes.
It also explains inertia, which is essentially an object's resistance to acceleration or deacceleration. If a change in motion occurs, a object with a high mass (and therefore high inertia) will be more likely to resist this change. This explains why when a car comes to a short stop, passengers keep moving forward since their larger mass makes them more resistance to the sudden stop of the car.
Newton's Second Law:
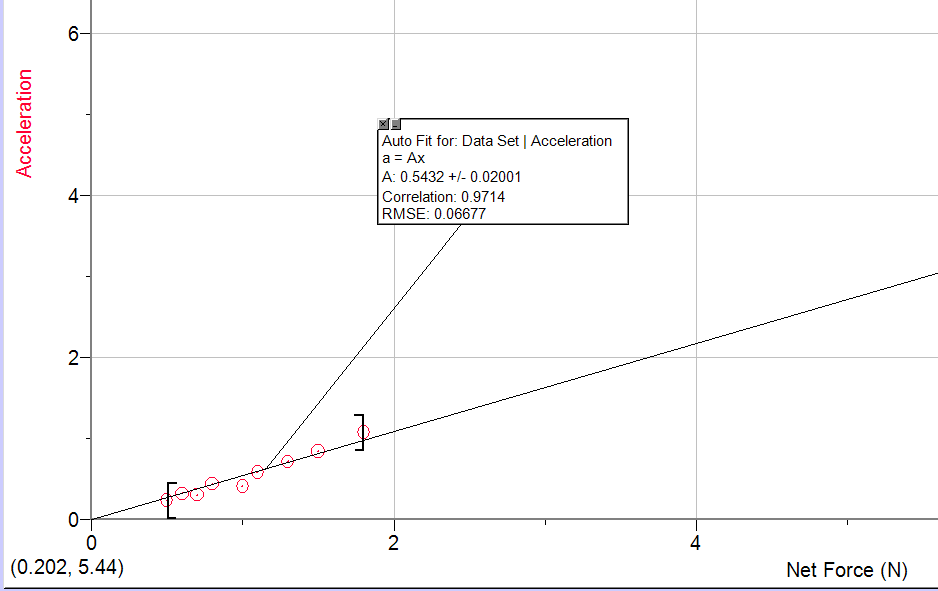
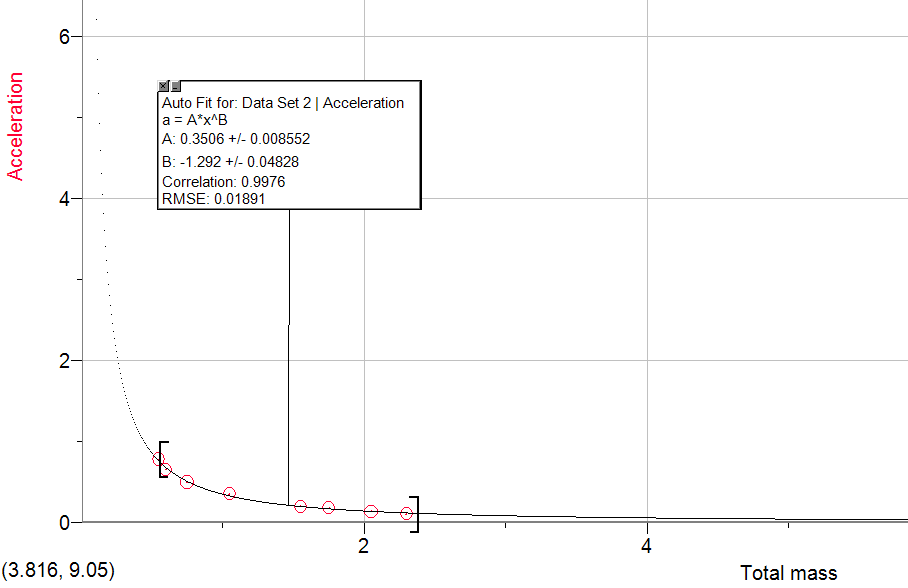
Newton's Second Law states that objects accelerate more when they feel a net force with a larger magnitude, meaning acceleration are net force are proportional. It also reinforces the law of inertia, as there is an inverse relationship between mass and acceleration, because a larger mass means more inertia, which equates to a lesser acceleration. This was confirmed in our unbalanced forces lab, as we found that applying more force to the cart by adding mass to the hangar resulted in an acceleration increase, while adding more mass to the cart itself resulted in an acceleration decrease. The graphs are pictured below, and show the relationships between net force and mass with acceleration. From the law and these experiments, you can also find the ever-important Zf (net force) = m * a equation.
Newton's First Law:
Newton's First Law of inertia tells us that an object in motion will have a constant velocity and direction unless acted on by an unbalanced force. So, for example, a soccer ball will have a constantly velocity after it is kicked, but, if another player stops it, then the velocity and direction changes.
It also explains inertia, which is essentially an object's resistance to acceleration or deacceleration. If a change in motion occurs, a object with a high mass (and therefore high inertia) will be more likely to resist this change. This explains why when a car comes to a short stop, passengers keep moving forward since their larger mass makes them more resistance to the sudden stop of the car.
Newton's Second Law:
Newton's Second Law states that objects accelerate more when they feel a net force with a larger magnitude, meaning acceleration are net force are proportional. It also reinforces the law of inertia, as there is an inverse relationship between mass and acceleration, because a larger mass means more inertia, which equates to a lesser acceleration. This was confirmed in our unbalanced forces lab, as we found that applying more force to the cart by adding mass to the hangar resulted in an acceleration increase, while adding more mass to the cart itself resulted in an acceleration decrease. The graphs are pictured below, and show the relationships between net force and mass with acceleration. From the law and these experiments, you can also find the ever-important Zf (net force) = m * a equation.
|
|
Newton's Third Law -
It states that there there is a force exerted upon each of the objects. They are balanced if they feel the same force but in opposite directions. A good example of this would be a sliding puck that is balanced in the y-direction since normal and gravitational force cancel out in this case.
Identifying Interactions (System Schema + Force Diagram) -
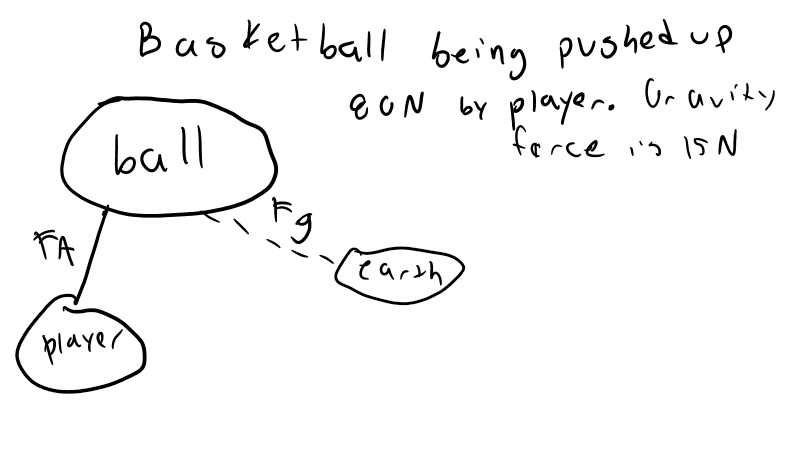
We can use different kinds of models and diagrams to represent how forces interact with each. For system schema, we can depict the forces between objects by drawing bubbles that represent the objects and connect them with lines that represent the forces. They are especially useful since they can provide a clearer representation of the forces at play and how certain objects interact with each other.
It states that there there is a force exerted upon each of the objects. They are balanced if they feel the same force but in opposite directions. A good example of this would be a sliding puck that is balanced in the y-direction since normal and gravitational force cancel out in this case.
Identifying Interactions (System Schema + Force Diagram) -
We can use different kinds of models and diagrams to represent how forces interact with each. For system schema, we can depict the forces between objects by drawing bubbles that represent the objects and connect them with lines that represent the forces. They are especially useful since they can provide a clearer representation of the forces at play and how certain objects interact with each other.
This system schema uses a dotted line for the gravity force between the basketball and Earth since it is a non-contact force. |
|
However, a system schema can be flawed since it does not depict direction or magnitude in anyway, which is why a force diagram is even better. It depicts the direction of the force, allowing us to see whether it's in the x or y direction. It also lets us see the relative ratio between different forces and tell whether forces are balanced or unbalanced.
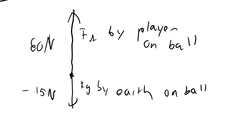
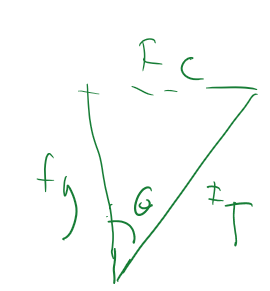
For the same scenario as the system schema example, I create a practice force diagram. Now, I was able to depict the net force of 65N in addition to the other forces at play. I was able to show how the applied force propels the ball upwards in the y-direction, while gravity drags it down in the y-direction but to a lesser extent.
Force Calculations -
When calculating forces, it is important to keep in mind a few important equations, which can be found from our knowledge on different kinds of forces.
- We know that Net force = mass * acceleration from our unbalanced force experiments when learning about Newton's second law. We can use this to find the total net force of a certain direction. We also know that Fg (force of gravity) = mass * gravity (and gravity is always +/- 9.8), meaning we can always find the mass or force of gravity if given the other.
- Fs = - (k * deltaX). Spring force, as proven by our findings in our spring demo, is the negative of the product of the spring's constant of k by the distance the spring is stretched/compressed. The spring's constant is essentially the sturdiness or stretchiness of the spring.
- The force of friction is when two objects rub against each other, creating a force in the opposite direction of an object's motion.
f = mew * Fn -> Force of friction = coefficient of friction * normal force. This in accordance with Hooke's law that states the coefficient of friction is equal to the force of friction divided b the normal force. The coefficient of friction, or mew, is essentially the surface's roughness that plays a huge role in the magnitude of the friction force. Oftentimes, we can use our knowledge of the force of gravity, which can help us find normal force and, other given variables to find the force of friction. This can help us determine the net force of whatever direction the friction force is in.
Solving Force Problems -
A first pivotal step is writing down as many given variables as possible and also creating a force diagram to gain a better understanding of what forces are at play. By writing down given variables, we can use the equations listed above to create a system of equations where we can ultimately find the x and y-component forces. Then, after filling out a force table, we can solve for the net force in all directions.
When calculating forces, it is important to keep in mind a few important equations, which can be found from our knowledge on different kinds of forces.
- We know that Net force = mass * acceleration from our unbalanced force experiments when learning about Newton's second law. We can use this to find the total net force of a certain direction. We also know that Fg (force of gravity) = mass * gravity (and gravity is always +/- 9.8), meaning we can always find the mass or force of gravity if given the other.
- Fs = - (k * deltaX). Spring force, as proven by our findings in our spring demo, is the negative of the product of the spring's constant of k by the distance the spring is stretched/compressed. The spring's constant is essentially the sturdiness or stretchiness of the spring.
- The force of friction is when two objects rub against each other, creating a force in the opposite direction of an object's motion.
f = mew * Fn -> Force of friction = coefficient of friction * normal force. This in accordance with Hooke's law that states the coefficient of friction is equal to the force of friction divided b the normal force. The coefficient of friction, or mew, is essentially the surface's roughness that plays a huge role in the magnitude of the friction force. Oftentimes, we can use our knowledge of the force of gravity, which can help us find normal force and, other given variables to find the force of friction. This can help us determine the net force of whatever direction the friction force is in.
Solving Force Problems -
A first pivotal step is writing down as many given variables as possible and also creating a force diagram to gain a better understanding of what forces are at play. By writing down given variables, we can use the equations listed above to create a system of equations where we can ultimately find the x and y-component forces. Then, after filling out a force table, we can solve for the net force in all directions.
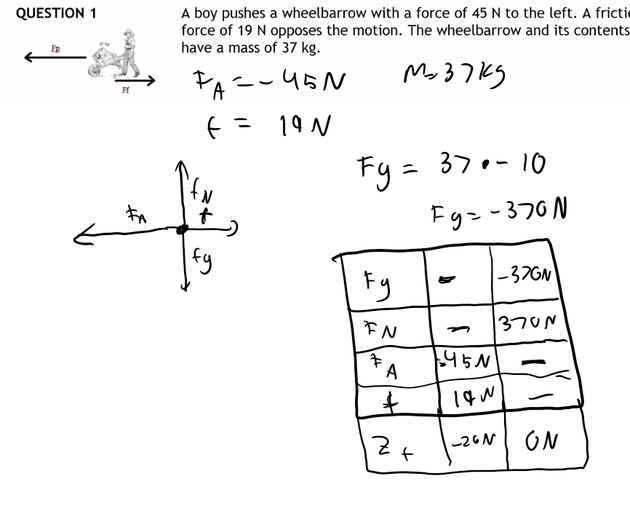
(Problem From OneNote Slides) - First, I wrote out all my givens, applied force, friction force, and the mass. I then created a force diagram depicting the motion of the applied force to the left being stronger than the friction force. I knew gravity and normal force had to cancel out here, because there was no vertical motion. Then, I used the equation for gravity force (37kg * -10 N/kg) to find that the gravity force is -370 N, and, from there, I knew the normal force was 370 since they had to cancel out. I showed this in a force table, and found there is a net force of -26 N (to the left) in the x-component.
Relating Representations of Motion and Force Models:
The major representations of motion, as we learned in the kinematics unit, are position-time, velocity-time, and acceleration-time graphs. To recap, a velocity-time graph represents velocity over time (the change in position), the slope of the position time-graph. In turn, an acceleration-time graph represents acceleration over time, which is the slope and derivative of a v-t graph. This is why an a-t graph is the derivative of a v-t graph that represents its slope. A net force-time graph is the same as an acceleration-time graph, as they both depict the change in velocity over time. This means that, like an a-t graph, a force-time graph also is the derivative and slope of a v-t graph and the second derivative of a p-t graph.
The major representations of motion, as we learned in the kinematics unit, are position-time, velocity-time, and acceleration-time graphs. To recap, a velocity-time graph represents velocity over time (the change in position), the slope of the position time-graph. In turn, an acceleration-time graph represents acceleration over time, which is the slope and derivative of a v-t graph. This is why an a-t graph is the derivative of a v-t graph that represents its slope. A net force-time graph is the same as an acceleration-time graph, as they both depict the change in velocity over time. This means that, like an a-t graph, a force-time graph also is the derivative and slope of a v-t graph and the second derivative of a p-t graph.
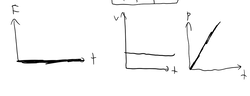
The graphs above depict this relationship, as the f-t graph is 0, and, as a result, the derivative of the v-t graph where y = a certain nonzero number. The slope of the v-t graph is 0, which is why the f-t graph's acceleration is constant at zero. The v-t graph represents the p-t graph's slope and is its derivative. This problem is inspired by question 3a on the 2.2 Mastering Physics homework.
Solving Problems of Forces and Motion -
These problems take the previously-mentioned force calculations to another level, as they require us to use the kinematic equations in addition to the force equations found above. In doing so, we employ systems of equations because there are more variables to deal with. This is why writing down all the variables beforehand and using force diagrams and tables are even more important, as they help us better organize problems with a lot of variables. Acceleration is key, as it is involved in both the equation for newton's second law ( F = ma) and also appears in several kinematic equations.
These problems take the previously-mentioned force calculations to another level, as they require us to use the kinematic equations in addition to the force equations found above. In doing so, we employ systems of equations because there are more variables to deal with. This is why writing down all the variables beforehand and using force diagrams and tables are even more important, as they help us better organize problems with a lot of variables. Acceleration is key, as it is involved in both the equation for newton's second law ( F = ma) and also appears in several kinematic equations.
|
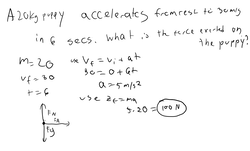
This question is taken from a YouTube video discussing this topic (link: https://www.youtube.com/watch?v=evbwiq3HcsE). First, like for the other problems, I would write out the variables that are given and visualize the motion of the puppy. However, we do not have enough values to plug them into our force equations, so, instead, we plug into the kinematic equation of Vf = vi + at. This way we can can find acceleration of the puppy, which we can use for force equations later. Then, you would plug in our acceleration and mass values to our Newton's second law equation find the net force exerted on the puppy is 100 N.
|
Circular Motion Assignment - In this unit, we explored the different forces at play when an object moves in a circular motion. We learned how to draw graphs to represent these values, and solved for different values, like maximum speed and radius, using certain new centripetal force and acceleration equations. We also covered universal gravitation, a specific, more complex type of circular motion and using the universal gravitation equation to solve for certain masses and radii.
Uniform Circular Motion - Centripetal force is a net force that acts on a body moving in circular motion and is always directed toward the center. It's the reason why an object moves in circular motion. Since centripetal force is a net force, it equals mass times acceleration. However, in this case, the acceleration is equal to v^2/r (speed squared over radius) and moves towards the circle.
This gives us two base equations: Fc = (m * v^2)/r and Ac = v^2/r
Problem Solving -
Note: In general, it's important to draw out a free body diagram and a bird's eye view model of the situation.
For horizontal circular motion, the centripetal force is usually presented in a scenario where it's equal to tension, friction, and sometimes normal/gravity force.
Example 1: You are spinning a 5 kg ball on a string with a radius of 10m at 20 m/s. What is the tension force? In this problem, the tension force points towards the center, meaning it's equal to the net force.
Fc = Ft
m * v^2/r = Ft -> plug in equation for net force and solve
5 ( 20)^2/10 = 200 N = Ft
Example 2: A 2 kg calculator is spinning on a record with a radius of 10m and a coefficient of friction of 0.5. What is the maximum speed the calculator can spin at without falling off? In this problem, the friction force points towards the center, meaning it's equal to the net force.
Fc = f
m * v^2/r = (coefficient of friction) * Fn -> plug in equations for net force and friction
m * v^2/r = (coefficient of friction) * m * g -> masses cancel out
v^2/r = (coefficient of friction) * g
v ^2 = (coefficient of friction) * g * r -> multiply both sides by the radius
v = radical of (o.5) * 9.8 * 10 = 7 m/s
Example 3 (more rare case): In some rare cases, you must you angle measurements to solve for the radius or speed. For example, a mass may be connected to a string and swing in the air at a different angle. To solve this, you can use trigonometry knowledge to find a correct expression.
For this problem, the tension force acts as the hypotenuse. Additionally, the smaller triangle side must be the net force, as it is pointing towards the center of the circle, meaning Fg must be the larger triangle leg.
tan (theta) = Fc/Fg -> use trigonometric equation for tan
Fg tan (theta) = Fc
mg tan (theta) = m * v^2/r
g tan (theta) = v^2/r
Vertical Motion: For vertical circular motion, the best examples can be a roller coaster or a ferris wheel. These problems usually involve either subtracting or adding the force of gravity and normal force.
tan (theta) = Fc/Fg -> use trigonometric equation for tan
Fg tan (theta) = Fc
mg tan (theta) = m * v^2/r
g tan (theta) = v^2/r
Vertical Motion: For vertical circular motion, the best examples can be a roller coaster or a ferris wheel. These problems usually involve either subtracting or adding the force of gravity and normal force.
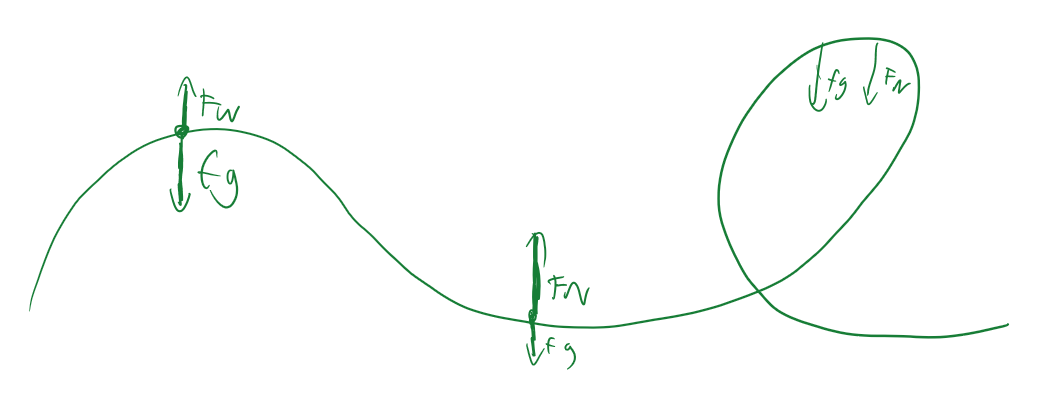
At the top of that peak, the force of gravity is larger than the normal force, so Fc = Fg - Fn.
At the bottom of the roller coaster, the force of gravity is smaller than the normal force, so Fc = Fn - Fg.
In a loop, the normal force and force of gravity both point downwards, but are still unbalanced. This means Fc = Fg + Fn
Example: Find the maximum speed of the cart before it slips of the tracks at the highest peak.
Fc = Fg - Fn -> set Fn = 0 because there is no contact with a surface when it slips off the tracks
Fc = Fg
m * v^2/r = m * g
v^2/r = g
v = radical of r * g
At the bottom of the roller coaster, the force of gravity is smaller than the normal force, so Fc = Fn - Fg.
In a loop, the normal force and force of gravity both point downwards, but are still unbalanced. This means Fc = Fg + Fn
Example: Find the maximum speed of the cart before it slips of the tracks at the highest peak.
Fc = Fg - Fn -> set Fn = 0 because there is no contact with a surface when it slips off the tracks
Fc = Fg
m * v^2/r = m * g
v^2/r = g
v = radical of r * g
Universal Gravitation: Universal gravitation is normally used for when the net force for a circular motion problem is equal to the force of gravity but involves two bodies and has a larger radius. You would set the net force equal to: (G * m1 * m2)/r^2. G is the universal gravitation constant, meaning, for all interactions between two bodies, there is a constant of 6.67 * 10^-11.
For example, if you wanted to solve for speed, you would
Fc = (G * m1 * m2)/r^2
m1 * v^2/r = (G * m1 * m2)/r^2
V^2/r = (G * m2)/r^2 -> masses of object #1 cancel out
v^2 = (G * m2)/r -> multiply radius by both sides
v = radial of (G * m2)/r
Common Mistakes = If the mass of object one changes, it doesn't matter since they're on different sides of the equation and always cancel out. Also sometimes the "radius" in the denominators of both sides are the distances from one object's center to another, so it's important to pay attention to that.
For example, if you wanted to solve for speed, you would
Fc = (G * m1 * m2)/r^2
m1 * v^2/r = (G * m1 * m2)/r^2
V^2/r = (G * m2)/r^2 -> masses of object #1 cancel out
v^2 = (G * m2)/r -> multiply radius by both sides
v = radial of (G * m2)/r
Common Mistakes = If the mass of object one changes, it doesn't matter since they're on different sides of the equation and always cancel out. Also sometimes the "radius" in the denominators of both sides are the distances from one object's center to another, so it's important to pay attention to that.
Energy Unit - Energy is essentially what we need to function, move, or do just about anything. It is stored in several different types of energy, and constantly undergoes an energy transfer from one time of type of energy to another depending on the type of energy transfer occurring and objects involved. In this unit, we aim to better model the transfer of energy, solve energy problems using these models, and find areas under these models. Also, we seek to better understand the relationship between work and power, and relate energy equations to force/motion equations.
Representing Energy Transfer with LOL Charts -
When discussing energy transfer, perhaps the most important thing to remember is the law of conservation of energy, which states that energy cannot be created or destroyed. Since no energy is gained or lost, you have the energy conservation equation E initial = E final. This is why the total amount of energy never changes, however, the energy in each specific energy type does change, so a transfer of energy is really a transfer of where energy is stored. The main energy types are elastic, kinetic, gravitational potential, thermal, and chemical, and are vary since their energy is stored in different places. For example, kinetic energy is stored in moving objects, while gravitational potential energy is stored in earth's gravitational field. There are three ways in with energy is transferred: W/working (where a force is involved), Q/heating (where it transfers from hot to cold), and R/radiating (loses energy by radiating light, gains energy by absorbing).
In order to be better prepared for solving energy problems, you need to create a conservation of energy equation where you set equal where the energy was initially stored in to where the energy is stored in at the end. Creating a model/LOL chart helps us visualize how much energy transfers, how it transfers, and where it ends up, which is important in creating the energy conservation equation.
When discussing energy transfer, perhaps the most important thing to remember is the law of conservation of energy, which states that energy cannot be created or destroyed. Since no energy is gained or lost, you have the energy conservation equation E initial = E final. This is why the total amount of energy never changes, however, the energy in each specific energy type does change, so a transfer of energy is really a transfer of where energy is stored. The main energy types are elastic, kinetic, gravitational potential, thermal, and chemical, and are vary since their energy is stored in different places. For example, kinetic energy is stored in moving objects, while gravitational potential energy is stored in earth's gravitational field. There are three ways in with energy is transferred: W/working (where a force is involved), Q/heating (where it transfers from hot to cold), and R/radiating (loses energy by radiating light, gains energy by absorbing).
In order to be better prepared for solving energy problems, you need to create a conservation of energy equation where you set equal where the energy was initially stored in to where the energy is stored in at the end. Creating a model/LOL chart helps us visualize how much energy transfers, how it transfers, and where it ends up, which is important in creating the energy conservation equation.
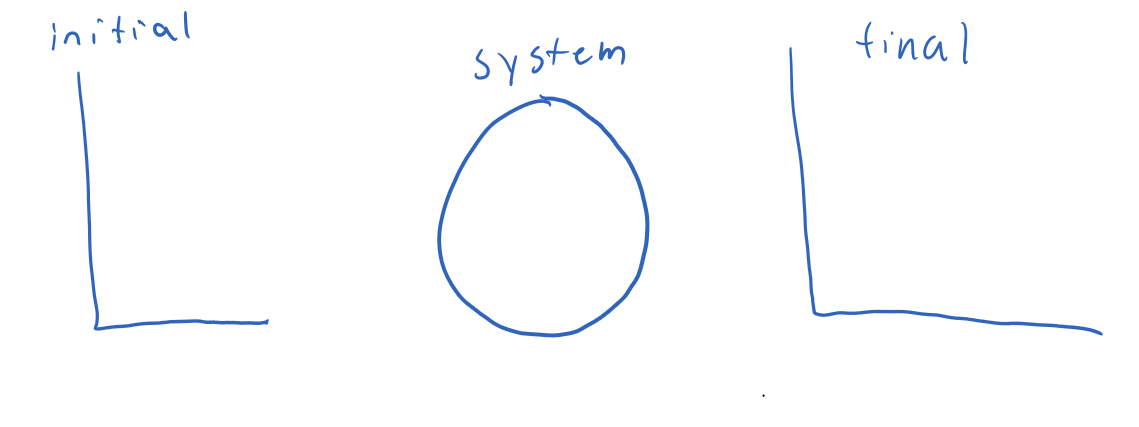
Pictured above is an LOL chart where, on the two graphs/"Ls", you would graph how much energy (relatively) is in each energy type on a bar chart. The middle circle is the system of the energy transfer, which is essentially the objects, people, and things at play that factor into the energy transfer.
Example (from OneNote slides) = On a winter day, you notice that as you sit on the bleachers, it makes your hindquarters cold. Complete the LOL chart and conservation equation for the transfer from the hindquarters as the bleachers.
Example (from OneNote slides) = On a winter day, you notice that as you sit on the bleachers, it makes your hindquarters cold. Complete the LOL chart and conservation equation for the transfer from the hindquarters as the bleachers.
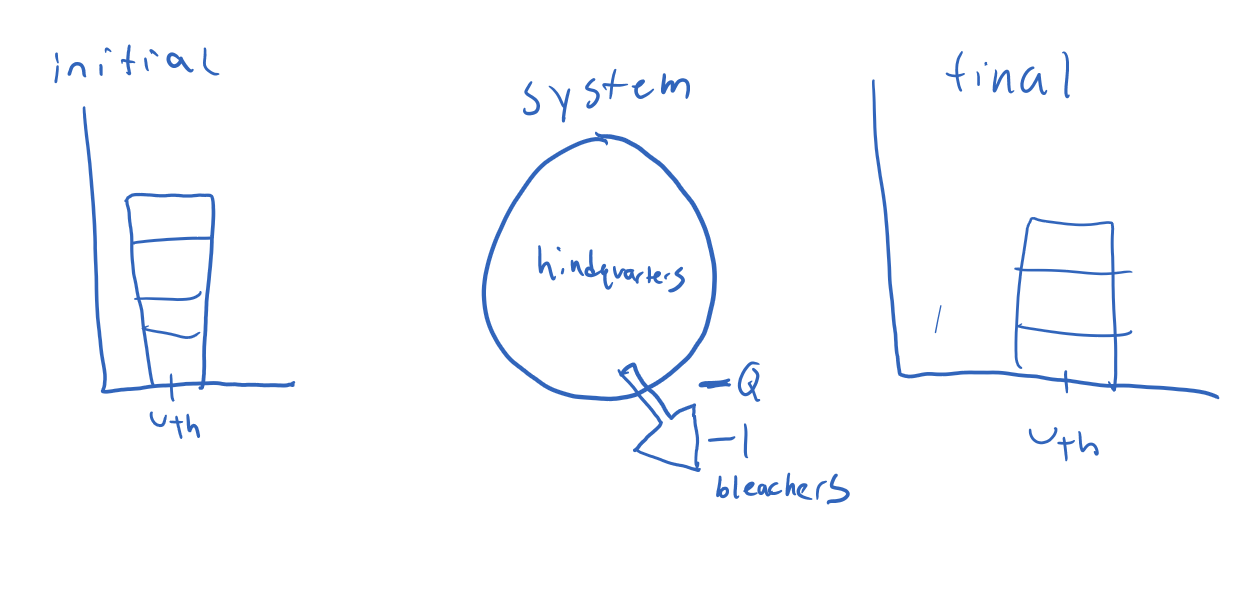
For this example, a heating energy transfer occurs, as energy transfers from the warmer temperature hindquarters to the colder bleachers. Our system is the hindquarters and only a little bit of energy is transferred, which is why it loses one bar from initial to final. It transfer to the bleachers, which is not represented in our LOL chart.
Using this, you can create the conservation equation of Uth intial - Q = Uth final
Using this, you can create the conservation equation of Uth intial - Q = Uth final
ExEnergy Problem Solving - When presented with a problem, the first step is to model the situation with an LOL chart and use it to create a conservation equation. Then, using the conservation equation, we can plug in some important formulas for certain energy types. Then, plug in the known variables and solve for the unknowns.
Kinetic energy = 1/2 * mass * velocity^2
Gravitational potential energy = mass * gravity * height
Elastic energy = 1/2 * k * displacement^2
Example (Question 5 from 4.2 MasteringPhysics)
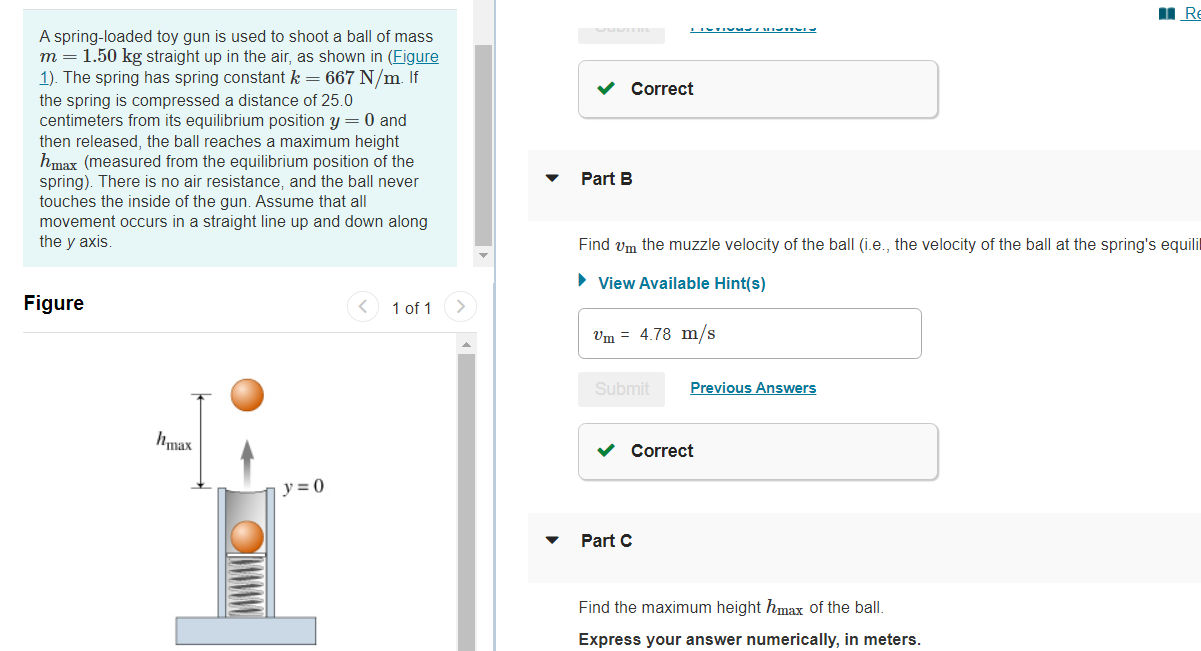
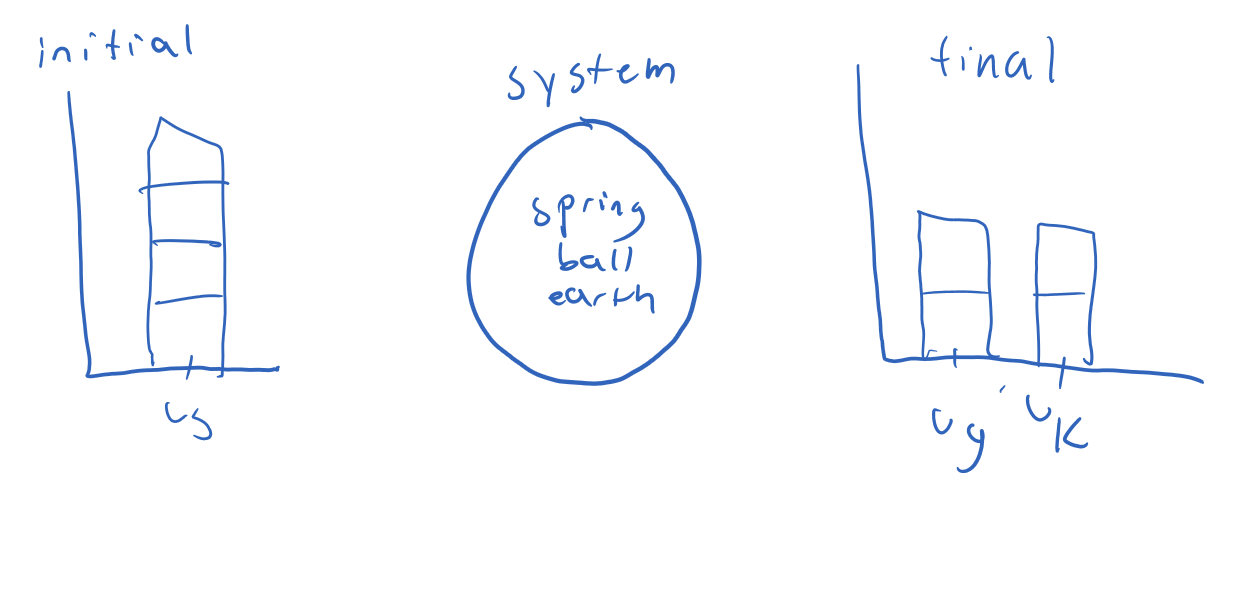
First, you would set up a LOL chart like the one below and see that the energy transfer from elastic (when the spring is compressed) to kinetic (since the ball is moving) and gravitation energy (since the earth is in the system. This gives you a conservation equation of: Us intial = Uk final + Ug final.
Us intial = Uk final + Ug final
1/2 * k * (displacement)^2 = 1/2 * m * v^2 + m * g * h
1/2 * k * (displacement)^2 - m * g * h = 1/2 * m * v^2
1/2 * 667 * (0.25)^2 - (1.5) * (9.8) * 0.25 = 1/2 * 1.5 * v^2
v^2 = 22.89
v = 4.78 m/s
1/2 * k * (displacement)^2 = 1/2 * m * v^2 + m * g * h
1/2 * k * (displacement)^2 - m * g * h = 1/2 * m * v^2
1/2 * 667 * (0.25)^2 - (1.5) * (9.8) * 0.25 = 1/2 * 1.5 * v^2
v^2 = 22.89
v = 4.78 m/s
Work = Work, expressed in Joules, is a transfer of energy and is essentially when an external push/pull acts upon a mass. Because of this, work is equal to the product of the force times the displacement.
W = F * (displacement)
W = m * g * (displacement)
Ex: Lifting a 5 kg mass by 0.35m 20 times.
W = (5 * 9.8) * 0.35 * 20 (for the reps) = 343 J
Power, expressed in Watts, is the rate of energy transfer, meaning it's how much work is done over a certain amount of time.
Power = W/t = (m * g * displacement)/time
Ex: Same as previous example but lifted for 30 seconds.
Power = 343 J/ 30 secs = 11.43 Watts
Relating Energy/Work/Power to Forces and Motion =
Some problems ask you to draw on previous knowledge of kinematics and forces when solving for energy/power problems. Typically, you need to use kinematic equations to solve some previously unknown variables.
Example (from 4.2 MasteringPhysics Question 12)
W = F * (displacement)
W = m * g * (displacement)
Ex: Lifting a 5 kg mass by 0.35m 20 times.
W = (5 * 9.8) * 0.35 * 20 (for the reps) = 343 J
Power, expressed in Watts, is the rate of energy transfer, meaning it's how much work is done over a certain amount of time.
Power = W/t = (m * g * displacement)/time
Ex: Same as previous example but lifted for 30 seconds.
Power = 343 J/ 30 secs = 11.43 Watts
Relating Energy/Work/Power to Forces and Motion =
Some problems ask you to draw on previous knowledge of kinematics and forces when solving for energy/power problems. Typically, you need to use kinematic equations to solve some previously unknown variables.
Example (from 4.2 MasteringPhysics Question 12)
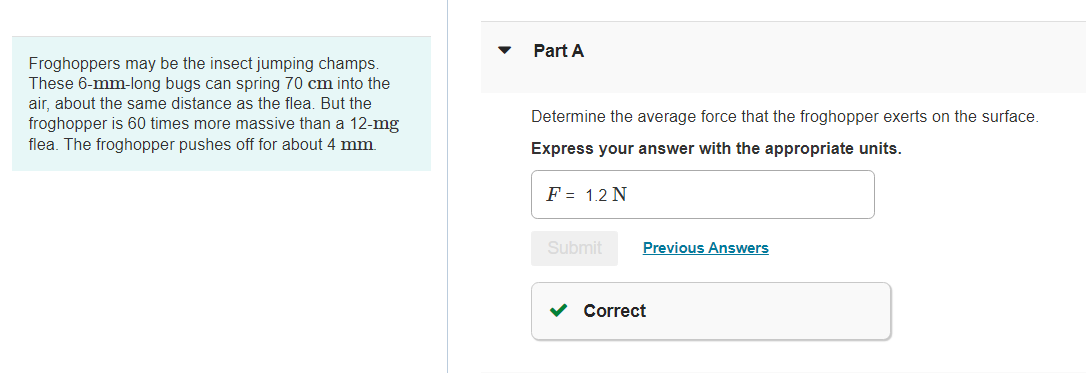
You know that work is equal to kinematic energy, which means F * displacement = 1/2 * m * v^2
However, to solve for the force, you need the velocity, which you can find using kinematic equation.
vf^2 = vi^2 + 2 * a * displacement --> you know initial velocity = 0 and acceleration = 9.8
vf^2 = 2 * 9.8 * .70m
vf = 3.704 m/s
Then, get the force (desired variable) on one side and plug in everything.
F = [1/2 * 60 * (12 * 10^-6 kg) * (3.706)^2]/0.004 = 0.0849/0.004 = 1.236 N
However, to solve for the force, you need the velocity, which you can find using kinematic equation.
vf^2 = vi^2 + 2 * a * displacement --> you know initial velocity = 0 and acceleration = 9.8
vf^2 = 2 * 9.8 * .70m
vf = 3.704 m/s
Then, get the force (desired variable) on one side and plug in everything.
F = [1/2 * 60 * (12 * 10^-6 kg) * (3.706)^2]/0.004 = 0.0849/0.004 = 1.236 N
Connecting Representations of Motion with Representations of Forces with Representations of Energy -
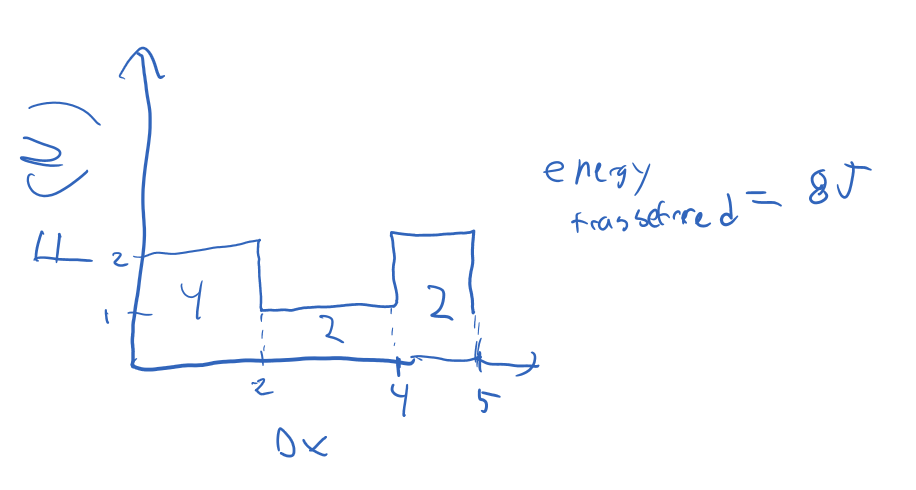
It's also important to understand how to represent energy graphically and recognize the relationships between force-displacement graphs too. The area under a force-displacement graph represents the energy transferred. To find the area under the graph, you simply divide it into smaller, easier-to-manage shapes and add their areas together. An example is shown below.
It's also important to understand how to represent energy graphically and recognize the relationships between force-displacement graphs too. The area under a force-displacement graph represents the energy transferred. To find the area under the graph, you simply divide it into smaller, easier-to-manage shapes and add their areas together. An example is shown below.
Unit 5 - Momentum:
In this unit, we aim to discover the effect of momentum on objects and, in doing so, analyzing the relationship between the mass and velocity during collision (momentum = m*v). We also explore concepts like impulse (the change in momentum), ways to graphically/visually represent collisions, and conservation of momentum word problems involving older concepts, like kinematics and energy.
Types of Collisions:
Momentum is conserved in these four main types of collisions: elastic, inelastic, totally inelastic, and explosions/totally inelastic, however, they differ in whether kinetic energy is lost, gained, or stays the same. An elastic collision is when two objects collide and the amount of kinetic energy stays the same after they bounce off each other with no loss in speed. In an inelastic collision, kinetic energy is lost and, unlike an elastic collision, the masses move at different final velocities. However, since momentum is conserved, when one object's velocity my increase by a certain amount, the other object's velocity decreases by the same amount, so momentum stays the same.
A totally inelastic collision is when two objects stick together, combining into one larger mass that moves at a different velocity. Momentum is still conserved but kinetic energy is lost. A common example of a totally inelastic collision is a fired bullet getting stuck in a block but still affecting the block enough for the bullet/block to move together. Finally, an explosion is when kinetic energy in the collision is gained.
Momentum is conserved in these four main types of collisions: elastic, inelastic, totally inelastic, and explosions/totally inelastic, however, they differ in whether kinetic energy is lost, gained, or stays the same. An elastic collision is when two objects collide and the amount of kinetic energy stays the same after they bounce off each other with no loss in speed. In an inelastic collision, kinetic energy is lost and, unlike an elastic collision, the masses move at different final velocities. However, since momentum is conserved, when one object's velocity my increase by a certain amount, the other object's velocity decreases by the same amount, so momentum stays the same.
A totally inelastic collision is when two objects stick together, combining into one larger mass that moves at a different velocity. Momentum is still conserved but kinetic energy is lost. A common example of a totally inelastic collision is a fired bullet getting stuck in a block but still affecting the block enough for the bullet/block to move together. Finally, an explosion is when kinetic energy in the collision is gained.
Impulse:
Impulse, represented by J, is simply the change in momentum that occurs after a collision but can be solved for/represented in various ways. In collisions where the momentum is conserved, there is no impulse, as there is no external force applied to a collision. If given the needed values, you can find momentum by subtracting initial momentum from final momentum, which is why one of the units of measurement for momentum is (kg* m/s). Additionally, you can also find momentum by multiplying net force by time (represented by unit of measure of N * s). This is why the area under a force-time graph gives you momentum and, for the four types of collisions listened above where momentum is conserved, the areas above/below the graph cancel each other out.
Note: The below graphs are from Mr. Frost's slideshows.
Impulse, represented by J, is simply the change in momentum that occurs after a collision but can be solved for/represented in various ways. In collisions where the momentum is conserved, there is no impulse, as there is no external force applied to a collision. If given the needed values, you can find momentum by subtracting initial momentum from final momentum, which is why one of the units of measurement for momentum is (kg* m/s). Additionally, you can also find momentum by multiplying net force by time (represented by unit of measure of N * s). This is why the area under a force-time graph gives you momentum and, for the four types of collisions listened above where momentum is conserved, the areas above/below the graph cancel each other out.
Note: The below graphs are from Mr. Frost's slideshows.
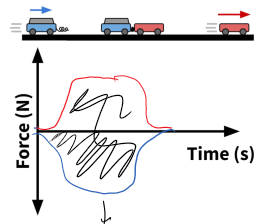
For this collision, the force values are equal at any point and the areas of both cars are always the same. (only difference is their sign). Since we know that a F-t graph's area is momentum and the total area of the collision cancels out, there is zero impulse in this model.
|
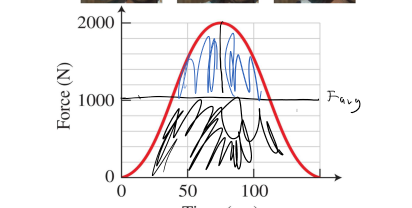
The area under this F-t graph is also momentum, however, it would be difficult to calculate due to its shape. However, you could draw a line at the midpoint of the function (between extrema) and create rectangle running from there to the x-axis. This midpoint line is our average force, and it works since the space above the Favg line (the blue parts) become part of this rectangle.
|
Important Impulse Equations:
J= Change in momentum (delta p) = Pf - Pi = Force * time (delta t) --> all of these can be used to plug in for J/impulse.
J= Change in momentum (delta p) = Pf - Pi = Force * time (delta t) --> all of these can be used to plug in for J/impulse.
Momentum Definitions/Charts:
Momentum (mass * velocity) is essentially how long/short the force and time need to stop an object after a collision. When collisions happen, either there is no change in overall momentum (even though there could be changes in mass or velocity) or an external force causes an impulse to change momentum of object(s). These situations can be represented by LIL charts, which depict a bar chart of our initial momentum, the impulse of the system, and the final momentum
Below is a problem from our slideshow from class:
Momentum (mass * velocity) is essentially how long/short the force and time need to stop an object after a collision. When collisions happen, either there is no change in overall momentum (even though there could be changes in mass or velocity) or an external force causes an impulse to change momentum of object(s). These situations can be represented by LIL charts, which depict a bar chart of our initial momentum, the impulse of the system, and the final momentum
Below is a problem from our slideshow from class:

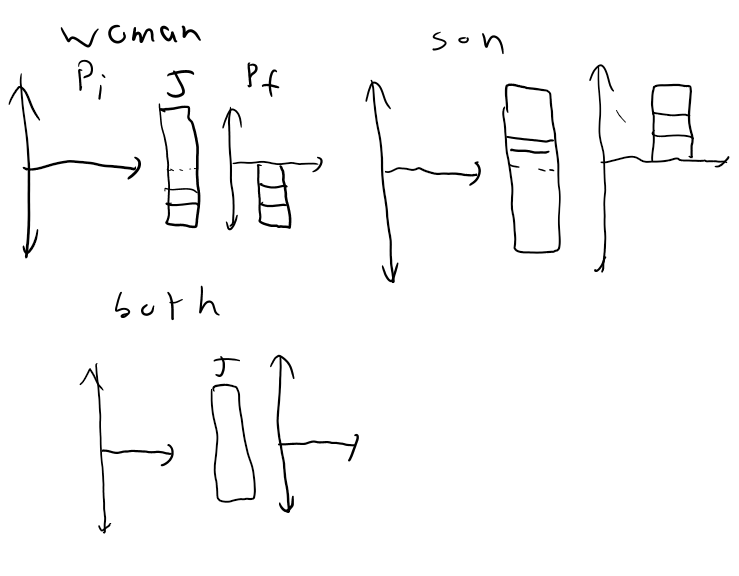
For this problem, when the woman/son are in their own systems, they lose/gain the same amount of energy due to the conservation of energy equation, but have different signs since they're moving in opposite directions. The amount they lose/gain is their respective impulse. This means that, if the woman and her son are in the same system, there is no change in momentum and there is no impulse.
Conservation of Momentum:
To solve momentum problems, it's important to recognize the type of collision and if there is an impulse/momentum is conserved (modeling it out on anLIL chart can help). With this information, yohoconservation of momentum equation, which tells us that the momentum of the two objects before the collisions is equal to (or equal to when impulse is added) the sum of the objects' final momentum. Then, after plugging in the given variables and making sure the equation is reflective of the type of collision, you solve for what the question asks for.
Pi = Pf
m1Vi1 + m2Vi2 = m1Vf1 + m2Vf2
The below question is taken from 12a on MasteringPhysics 5.1
To solve momentum problems, it's important to recognize the type of collision and if there is an impulse/momentum is conserved (modeling it out on anLIL chart can help). With this information, yohoconservation of momentum equation, which tells us that the momentum of the two objects before the collisions is equal to (or equal to when impulse is added) the sum of the objects' final momentum. Then, after plugging in the given variables and making sure the equation is reflective of the type of collision, you solve for what the question asks for.
Pi = Pf
m1Vi1 + m2Vi2 = m1Vf1 + m2Vf2
The below question is taken from 12a on MasteringPhysics 5.1

|
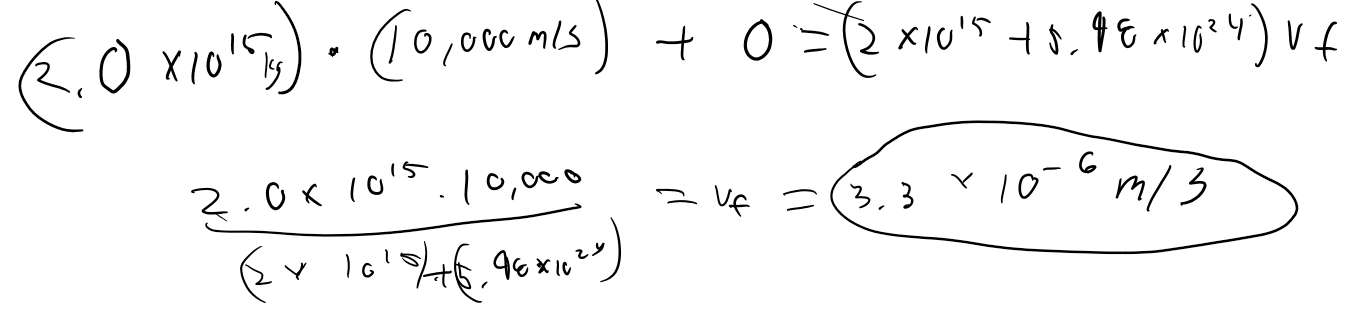
In this problem, I recognized that the meteor crashing into Earth is a totally inelastic collision where momentum is conserved, meaning the masses combine into one larger mass and have the same velocity (and no impulse). The equation becomes m1Vi1 + 0 = (m1 + m2)vf .
Since m2 (earth is at rest), the initial momentum is only the initial momentum of the meteor. Finally, you can plug in the appropriate values and divide m1Vi1 by (m1 + m2) to find the speed earth gains is 3.3E-6 m/s. |
Center of Mass:
The center of mass of a system is the average position of all parts of the system and where it always maintains the same momentum. It explains why forces counteract each other and momentum is conserved since the center of mass wants to be at the center.
Ex (from 5.04B from the Quiz):
The center of mass of a system is the average position of all parts of the system and where it always maintains the same momentum. It explains why forces counteract each other and momentum is conserved since the center of mass wants to be at the center.
Ex (from 5.04B from the Quiz):
The man is climbing up a ladder to the balloon, which brings the center of mass up, so the balloon moves down to counteract the upward force in order to stay at the same center of mass. This explains why momentum is conserved in this scenario. In terms of the conservation of momentum equation, the velocity of object 1 (the man increases in the positive direction. As a result, in order to counteract that force and stay at the same center of mass, the balloon decreases its velocity in the opposite direction.
Relating Momentum to Energy, Forces, and Kinematics:
There are also several questions where it's important to use what we find from momentum equations to find other values, which requires our prior knowledge of old topics and multiple equations.
There are also several questions where it's important to use what we find from momentum equations to find other values, which requires our prior knowledge of old topics and multiple equations.
|
|
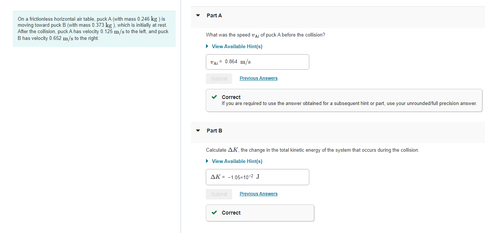
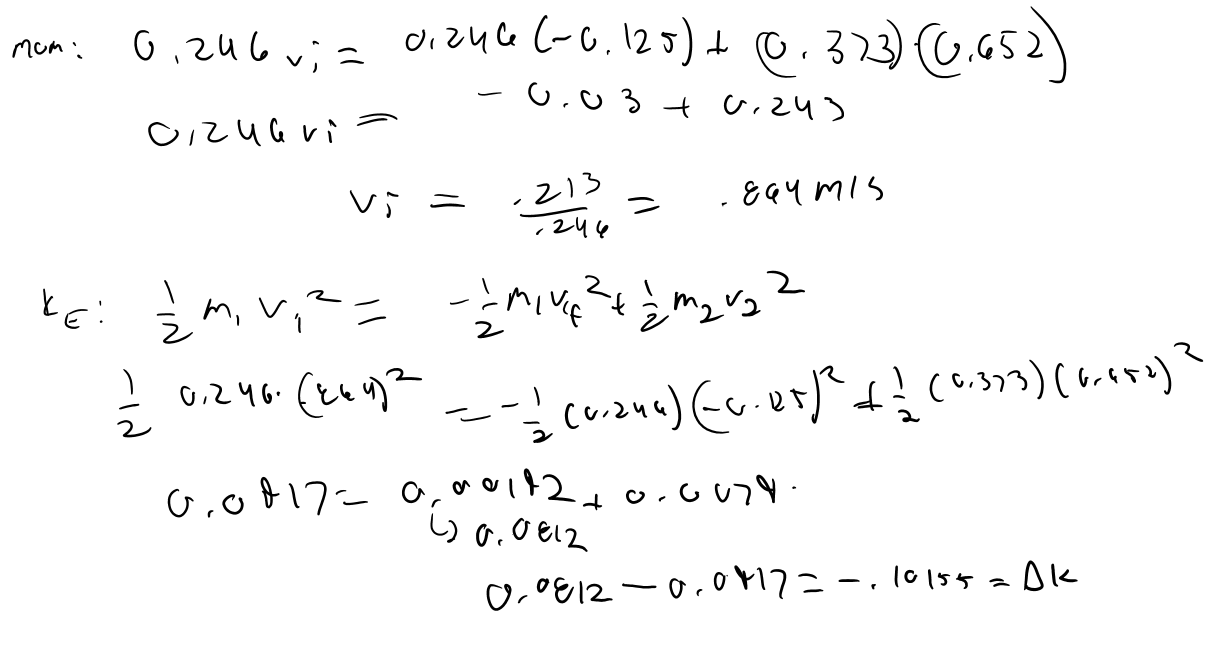
For this question (18 from MasteringPhysics 5.1), first, I recognized that momentum was conserved and set up a conservation of momentum equation where I solved for the initial velocity of object one (0.864 m/s). The next part asked to solve for the change in kinetic energy, meaning they wanted me to use my prior knowledge of the kinetic energy formula (1/2 * m * v^2) to subtract final Ke from initial Ke (-.10155 J). You can use the initial velocity found in Part A to find the initial kinetic energy.

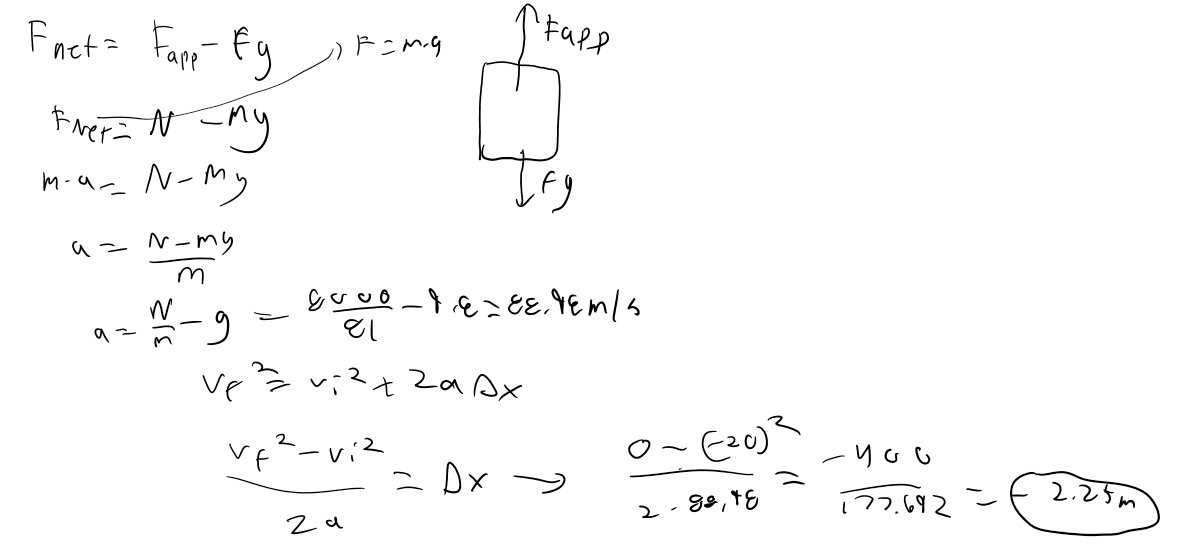
The above problem (17 from MasteringPhysics 5.2) combines forces and kinematic equations to solve a problem. First, I drew a free body diagram to find that the net force = N - mg. Then, I used my knowledge of force = m * a to solve for the acceleration of the block which I plugged into the kinematic equation Vf^2 - vi^2 = 2a (displacement). Since I had all the variables (including acceleration from the previous part), I isolated displacement and found it was -2.25m.
